Progetta con la Nasa robot a guida autonoma intelligente e capacità di ricarica wireless
30 dicembre 2020
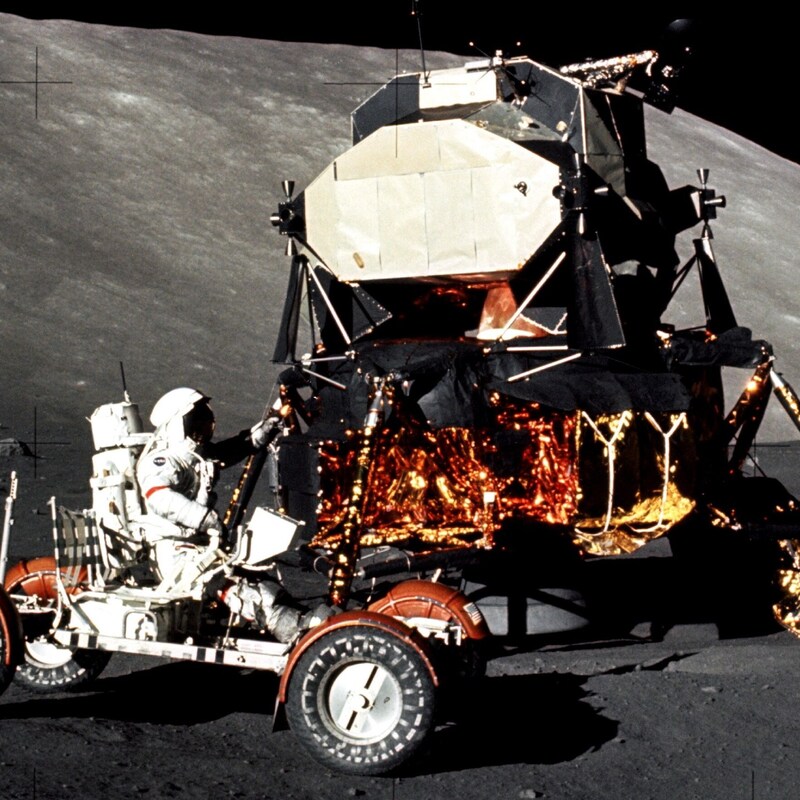
Anche sulla Luna i robot per funzionare hanno bisogno di energia: di solito è fornita dai pannelli solari di bordo, ma i modelli più piccoli o che lavorano durante la notte lunare hanno bisogno di fonti di alimentazione complementari.
Un obiettivo potenzialmente reso possibile dalla combinazione di due tecnologie emergenti come la ricarica wireless e la navigazione autonoma intelligente, che consentiranno a piccoli robot di muoversi ed operare in condizioni difficili.
La Nasa (National Aeronautics and Space Administration) ha deciso di finanziare con 5,8 milioni di dollari il progetto “Ultra Fast Proximity Charging for Critical Space Applications”: Astrobotic, specializzata in robotica spaziale, alla guida del team di lavoro, sarà coadiuvata da Bosch, dall'Università di Washington, da WiBotic e dal Glenn Research Center della NASA.
Bosch, Astrobotic ed altri partner hanno sviluppato attraverso un processo durato quasi due anni, la tecnologia chiave e definito il campo di applicazione del progetto: come detto, l’obiettivo è sviluppare un sistema per la ricarica wireless basata sulla risonanza magnetica per l'impiego in ambienti lunari, che includa la navigazione autonoma dei robot verso la stazione di ricarica wireless.
I ricercatori Bosch di Pittsburgh (Pennsylvania) e Sunnyvale (California) lavoreranno sull’elaborazione intelligente che permetterà la navigazione autonoma dei robot sulla superficie della Luna; il progetto si baserà sul know-how di Bosch nell'AIoT - Artificial Intelligence e Internet of Things.
Bosch si occuperà non solo di connettere gli oggetti per ottenere ed elaborare i dati, ma anche di usare l'IA per acquisire informazioni che a loro volta potranno migliorare e ottimizzare i prodotti.
Il robot prototipo scelto per il progetto è il CubeRover di Astrobotic, un rover planetario ricaricabile ultraleggero sviluppato in collaborazione con il Kennedy Space Center della Nasa; ha dimensioni di una scatola di scarpe e pesa poco più di due chili e può trasportare il proprio carico oppure fare squadra con altri CubeRover.
L'obiettivo è arrivare ad sistema completo per una prima dimostrazione entro metà 2023.
«Consentire a un robot di navigare sulla Luna - ha detto Samarjit Das, direttore del gruppo Intelligent Internet of Things presso il centro di ricerca Bosch di Pittsburgh - non è come far muovere un robot aspirapolvere in casa o permettere a un'auto di guidare in modo autonomo. Innanzitutto, le soluzioni di localizzazione terrestre via radio non sono disponibili sulla Luna, mentre l'imprevedibile terreno lunare e la polvere complicano la navigazione guidata dai soli segnali visivi. Per questo, per superare questa straordinaria sfida nell’impervio ambiente lunare, avremo bisogno di una fusione e di una percezione intelligente dei dati multisensoriali dei robot».
Bosch studierà e svilupperà tecnologie di fusione multisensoriale che comprenderanno video, unità di misura inerziali (IMU), radiofrequenza (RF) e sensori di vibrazione sui piccoli robot per creare modalità complementari per una navigazione ad alta precisione: la prima navigazione specifica consisterà nel ricondurre il robot a una docking station per la ricarica wireless.






![Toyota bZ4X: rivisto il look dell'elettrica, chissà se le cambiano anche il nome [VIDEO]](https://img.stcrm.it/images/43167274/400x/2025-bz4xawd-main-5.jpeg)

